







Module de Contrôle avec Driver Intégré pour Moteur Pas-à-Pas – Performance et Précision en Automatisation Industrielle
Ce module de contrôle avec driver intégré est spécialement conçu pour les moteurs pas-à-pas à un seul axe, offrant une solution complète pour l’automatisation industrielle, le contrôle CNC, la robotique et les systèmes d’emballage mécanique. Il fonctionne de manière autonome ou en combinaison avec d’autres systèmes, sans nécessiter Arduino ou Python, idéal pour les applications de contrôle industriel et la position précise des moteurs pas-à-pas.
Caractéristiques principales
- Contrôleur et Driver Intégré : Assure le contrôle du moteur pas-à-pas et surveille l’état de fonctionnement en temps réel.
- Rotation Avant et Arrière : Change la direction de rotation via bouton ou potentiomètre, automatique selon le mode de fonctionnement.
- 3 Modes de Contrôle : Mode prédéfini, contrôle via boutons externes ou drivers additionnels.
- 9 Programmes de Travail : Inclut des programmes pour diverses applications : Avant/Arrière, Délai, Boucles, Blocage automatique, Vitesse de rotation, etc.
- Écran LCD HD : Affiche la vitesse, le nombre de cycles et les paramètres de contrôle, avec mémoire et grande précision.
Paramètres techniques
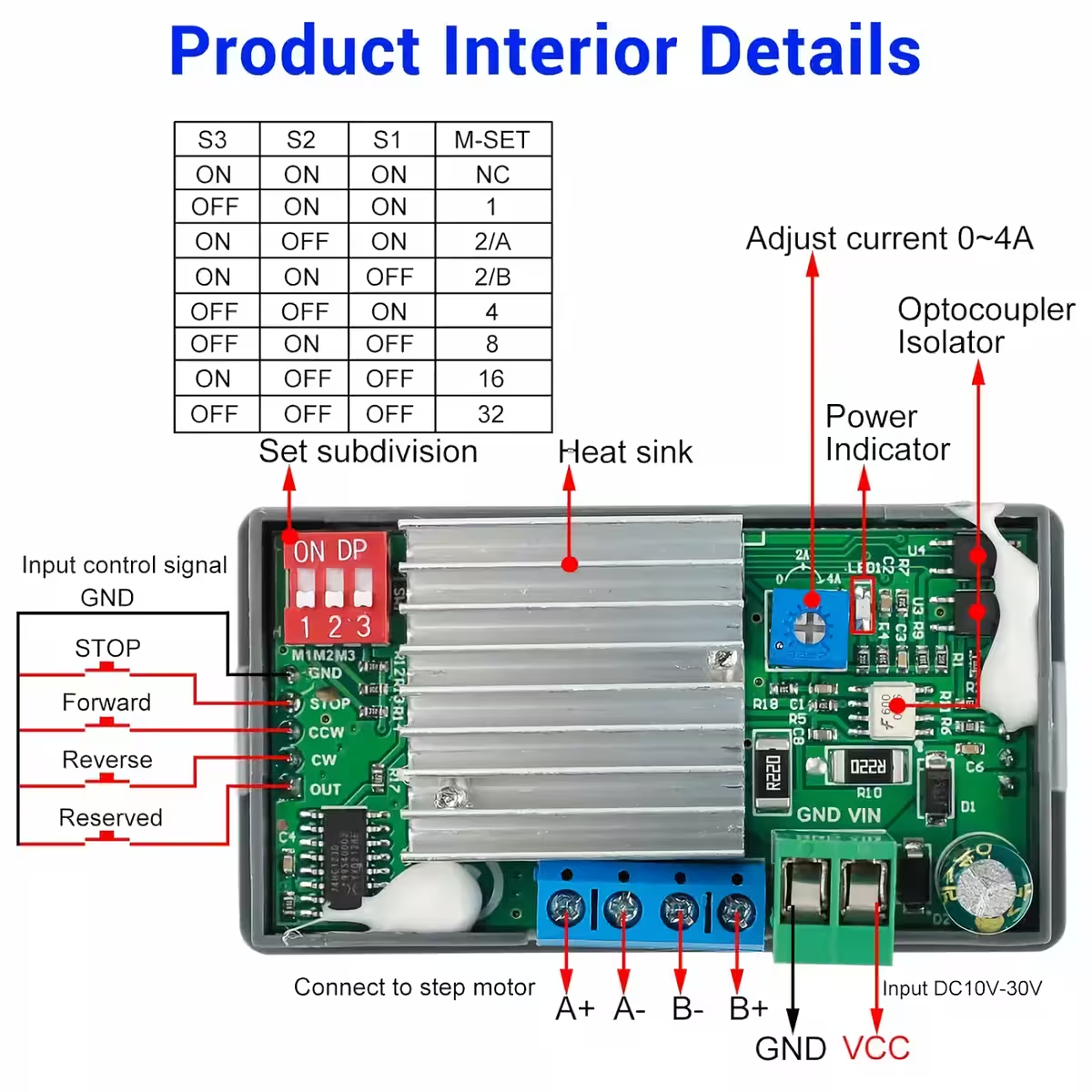
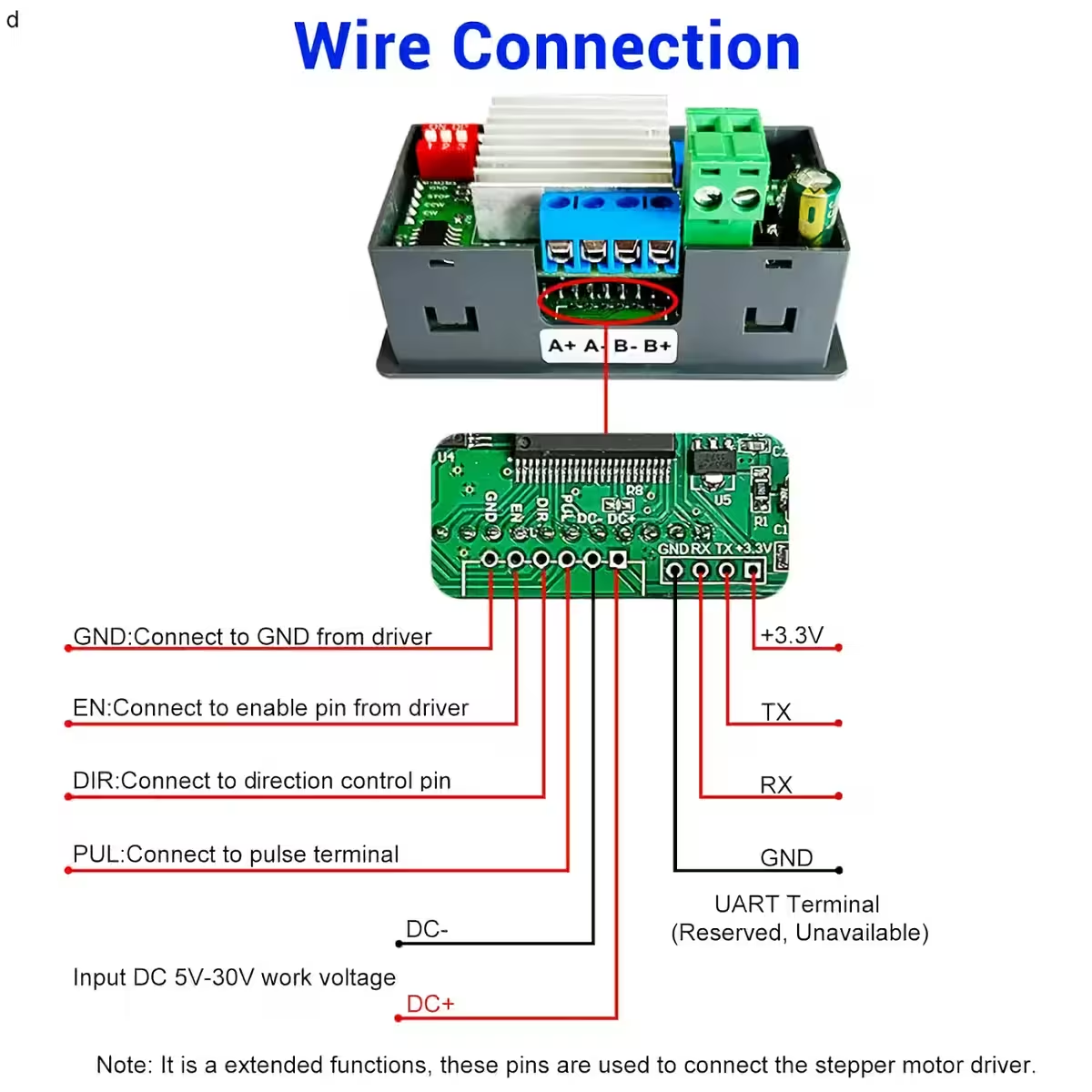
- Tension d’entrée : DC 5V-30V
- Courant de sortie/driver : 4A (max)
- Axe de contrôle : Un seul axe
- Moteur compatible : Stepper 42/57 (Nema17 / Nema23)
- Vitesse de contrôle : 0,1-999 RPM
- Nombre d’impulsions avant/arrière : 1-9.999.999
- Nombre de cycles : 1-9.999 ou boucle infinie
- Délai avant/arrière : 0,0-999,9 secondes
- Subdivision : 1/2/4/8/16/32
- Contrôle accélération/décélération : Oui
- Protection inversion de polarité : Oui
- Modes de contrôle : Automatique/Manuel/Paramétrage
- Température de fonctionnement : -20°C à 85°C
- Humidité de fonctionnement : 5% à 95% HR
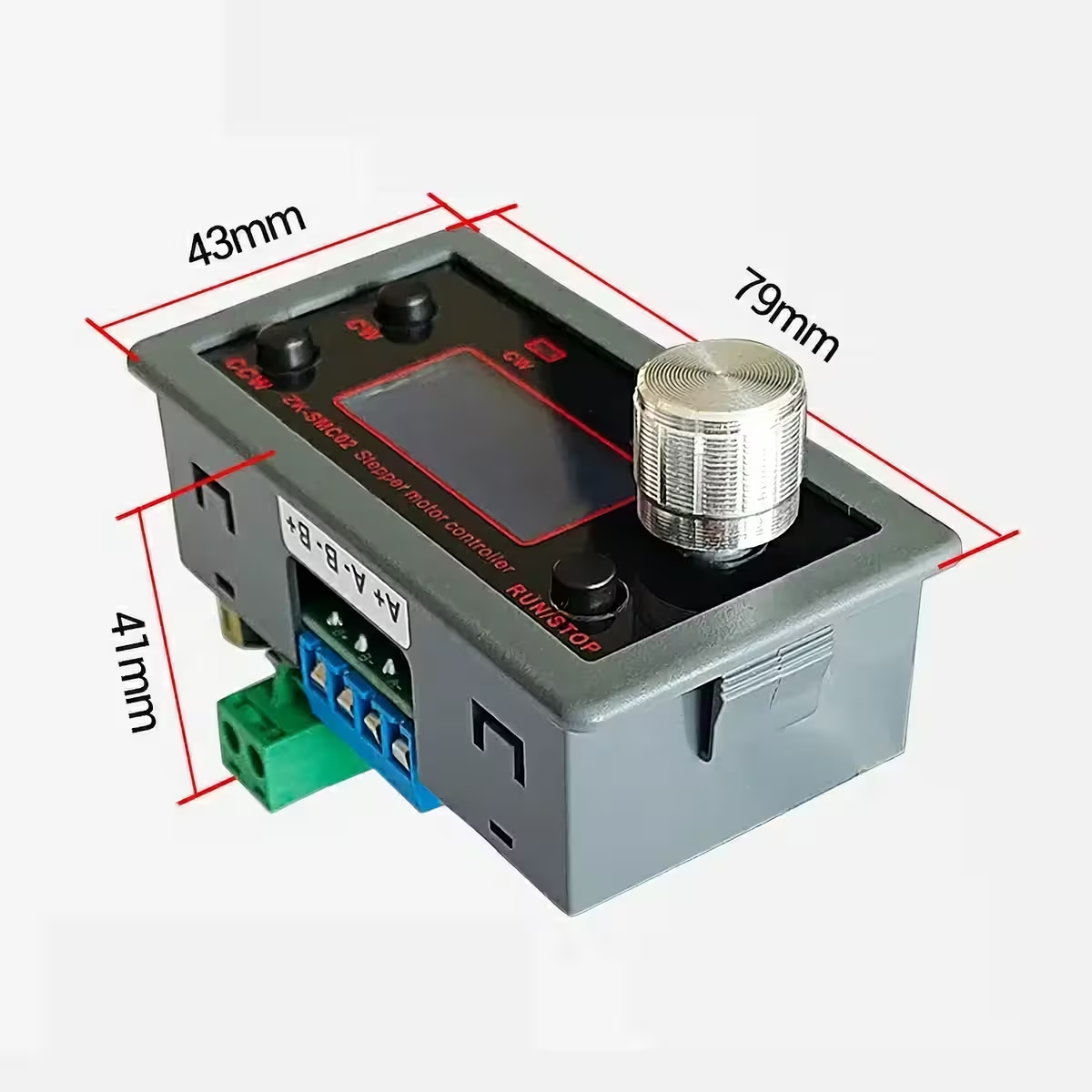
- Dimensions du module : 79 x 43 x 41 mm
Méthodes de configuration
1. Interface de fonctionnement
- La première ligne affiche la vitesse de rotation en RPM.
- La deuxième ligne affiche le temps de retard ou le nombre de cycles, réglable via le menu F-10.
- Bouton CW : rotation avant.
- Bouton CCW : rotation arrière.
- Bouton RUN/STOP : démarrage/arrêt.
- Potentiomètre : ajustement de la vitesse dans les deux sens.
- Maintien du potentiomètre >3 secondes : entrée en mode paramétrage.
2. Interface des paramètres
- Rotation du potentiomètre pour sélectionner le paramètre F-01~F-13.
- Le paramètre sélectionné clignote.
- Appuyer sur le potentiomètre pour choisir la valeur.
- Modifier la valeur en tournant le potentiomètre ou en sélectionnant les bits.
- Bouton RUN/STOP : confirmation des paramètres.
- Sauvegarde et sortie du mode paramétrage après >3 secondes.
3. Fonction auxiliaire
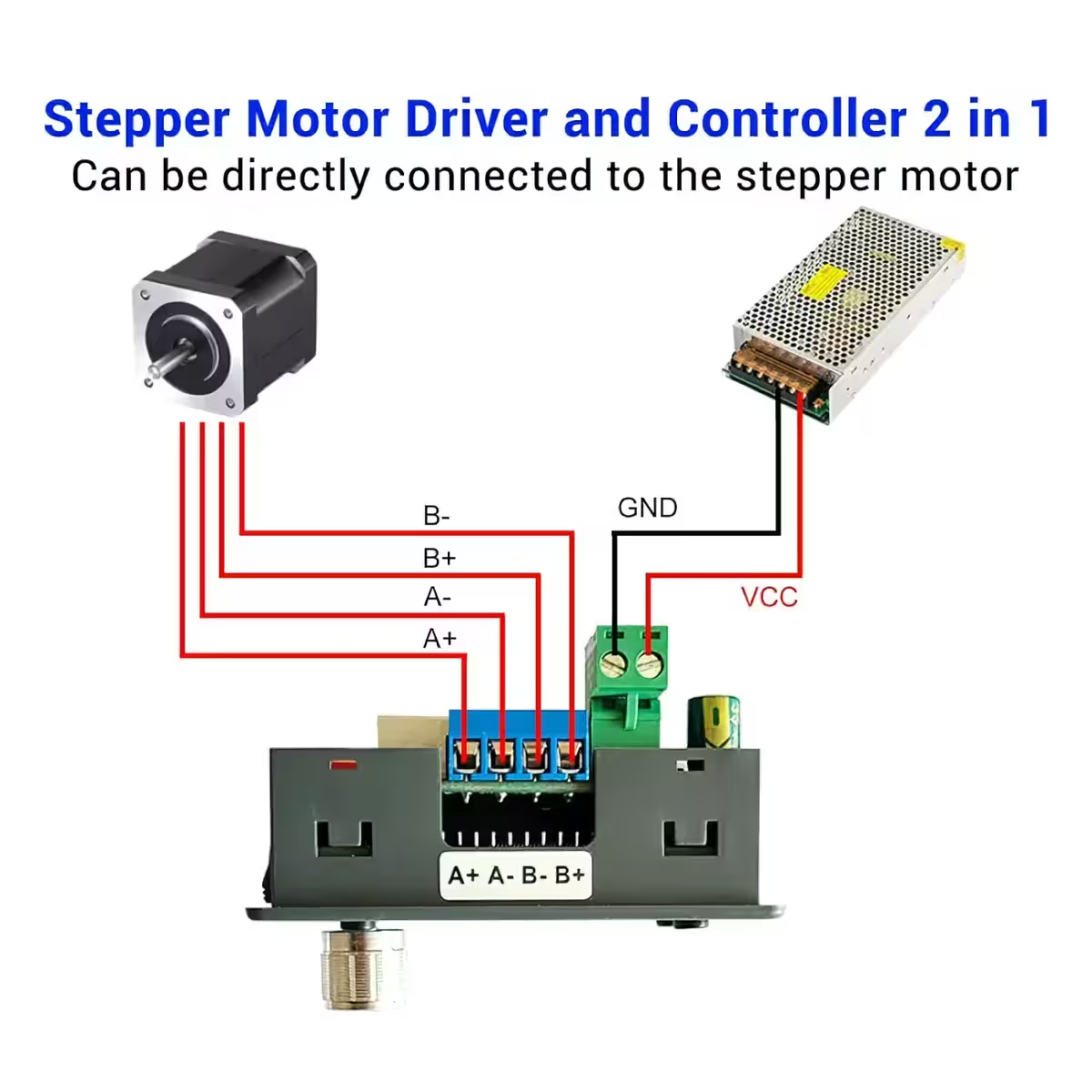
- Fonctionnement autonome en connectant seulement l’alimentation et le moteur.
- Possibilité de connecter des boutons externes pour un contrôle supplémentaire.
- Compatible avec d’autres drivers de moteurs pas-à-pas – modes Auto/Manuel/Setup.
4. Modes de fonctionnement
- Mode de Contrôle Automatique : fonctionne avec les paramètres définis.
- Mode de Contrôle Manuel : nécessite la connexion des boutons aux bornes COM/STOP/CCW/CW.
- Mode Paramétrage : connexion à d’autres drivers pour moteurs pas-à-pas.
Notes importantes
- Compatible avec les moteurs pas-à-pas 2 phases, quel que soit le nombre de fils (4, 5, 6 ou 8).
- Inclut drivers et contrôleurs intégrés, mais peut également être connecté à d’autres drivers externes.
Applications
- Contrôle industriel automatisé
- Machines CNC
- Emballage mécanique
- Traitement et test électronique
- Lignes d’assemblage automatique
- Robotique et automatisation des processus
- Systèmes de positionnement et mouvement
| Paramètre | Fonction | Intervalle de réglage | Valeur par défaut |
|---|---|---|---|
| F-01 → ? | Sélection du mode de fonctionnement. Voir le tableau suivant. | P01~P09 | P01 |
| F-02 | Nombre d’impulsions avant. Changement du bit High/Low via le potentiomètre : High 3Bit : Hxxx, Low 4Bit : xxxx | 1~9999999 | 1600 |
| F-03 | Vitesse de rotation avant en RPM | 0.1~999.9 | 10 |
| F-04 | Nombre d’impulsions arrière. Changement du bit High/Low via le potentiomètre : High 3Bit : Hxxx, Low 4Bit : xxxx | 1~9999999 | 1600 |
| F-05 | Vitesse de rotation arrière en RPM | 0.1~999.9 | 10 |
| F-06 | Nombre de cycles de travail (‘—-’ signifie boucle infinie) | 0~9999 ou boucle infinie | 1 |
| F-07 | Délai avant déplacement en secondes. ±0.2s | 0.0~999.9 | 0 |
| F-08 | Délai arrière déplacement en secondes. ±0.2s | 0.0~999.9 | 0 |
| F-09 | Nombre d’impulsions pour une rotation. Unité : 10. Ex : angle pas 1.8° et subdivision 8 → impulsions = 360/1.8*8 = 1600. La valeur réglée doit être 160. | 1~9999 | 160 |
| F-10 | Paramètres affichage LCD : 0 : 1ère ligne = vitesse moteur RPM, 2ème ligne = temps de retard en secondes. 1 : 1ère ligne = RPM, 2ème ligne = nombre de cycles. | 0 ou 1 | 0 |
| F-11 | État moteur après RUN/STOP : 0 : réduction lente et arrêt. 1 : arrêt immédiat. | 0 ou 1 | 0 |
| F-12 | Niveau accélération/décélération : 001 lent, 100 rapide. | 001~100 | 20 |
| F-13 | Adresse de l’appareil | 001~255 | 1 |
| Mode de Fonctionnement | Processus de Travail |
|---|---|
| F-01 → P01 |
1. Le moteur fonctionne selon la rotation du potentiomètre. Les autres boutons sont inactifs. 2. Rotation avant, indicateur CW allumé si potentiomètre tourné dans le sens horaire. 3. Rotation arrière, indicateur CCW allumé si potentiomètre tourné antihoraire. |
| F-01 → P02 |
1. Le moteur tourne selon les impulsions définies en F-02 et F-04. 2. Arrêt après chaque série d’impulsions, réinitialisation via potentiomètre. 3. Boucle répétée selon le nombre de cycles en F-06. |
| F-01 → P03 |
1. Rotation et arrêt alternés selon impulsions définies. 2. Direction avant/arrière définie par F-02/F-04. 3. Réinitialisation de la vitesse via potentiomètre. 4. Remarque : Arrêter le moteur avant de changer de direction. |
| F-01 → P04 |
1. Rotation F-02/F-04 et arrêt, répétition boucle F-06. 2. Direction avant : F-02 → arrêt F-07 → boucle. 3. Direction arrière : F-04 → arrêt F-08 → boucle. 4. Réinitialisation RPM via potentiomètre. 5. Remarque : Arrêter le moteur avant changement de direction. |
| F-01 → P05 |
1. Rotation F-02/F-04, retour à l’origine et répétition boucle F-06. 2. Avant : F-02 → arrêt F-07 → boucle → retour. 3. Arrière : F-04 → arrêt F-08 → boucle → retour. 4. Réinitialisation RPM via potentiomètre. 5. Remarque : Arrêter le moteur avant changement de direction. |
| F-01 → P06 |
1. Rotation F-02/F-04, changement de direction et répétition boucle F-06. 2. Avant : F-02 → arrêt F-07 → inversion F-04 → arrêt F-08 → boucle. 3. Arrière : F-04 → arrêt F-08 → inversion F-02 → arrêt F-07 → boucle. 4. Réinitialisation RPM via potentiomètre. 5. Remarque : Arrêter le moteur avant changement de direction. |
| F-01 → P07 |
1. Rotation selon impulsions, retour à l’origine dans direction opposée. 2. Avant : F-02 → arrêt F-07 → retour. 3. Arrière : F-04 → arrêt F-08 → retour. 4. Réinitialisation RPM via potentiomètre. |
| F-01 → P08 |
1. Rotation selon délais F-07/F-08, arrêt, puis boucle F-06. 2. Avant : F-07 → arrêt F-08 → boucle. 3. Arrière : F-08 → arrêt F-07 → boucle. 4. Réinitialisation RPM via potentiomètre. 5. Remarque : Arrêter le moteur avant changement de direction. |
| F-01 → P09 |
1. Rotation avant F-02, arrêt F-07, puis rotation arrière F-04, arrêt F-08, répétition boucle F-06. 2. Réinitialisation RPM via potentiomètre. 3. Remarque : Arrêter le moteur avant changement de direction. |










Avis
Il n’y a pas encore d’avis.