



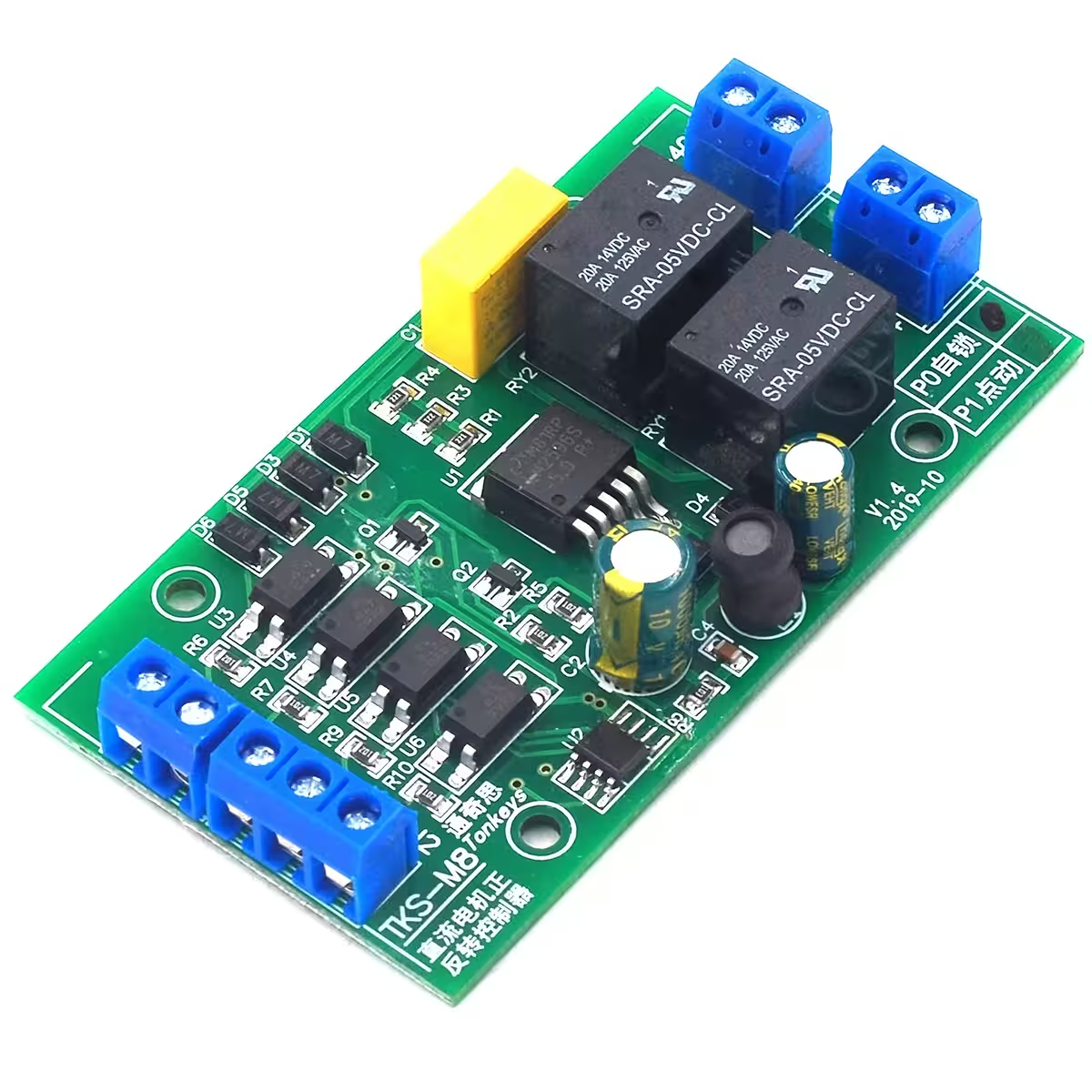
Contrôleur de direction pour moteur CC – gérez le mouvement avant/arrière sans composants externes
Vous travaillez sur un actionneur linéaire, un mécanisme réversible ou un projet DIY nécessitant un contrôle précis de la direction ? Oubliez les montages complexes à base de relais, de transistors et de câblages fastidieux. Ce contrôleur de direction pour moteur CC centralise tout dans un module compact : connectez simplement votre alimentation, votre moteur et vos boutons, et votre système est opérationnel en quelques minutes.
Note : Le moteur reçoit la même tension que celle fournie par la source d’alimentation. La tension n’est pas régulée par ce contrôleur.
Pourquoi choisir ce modèle ? (Points forts) :
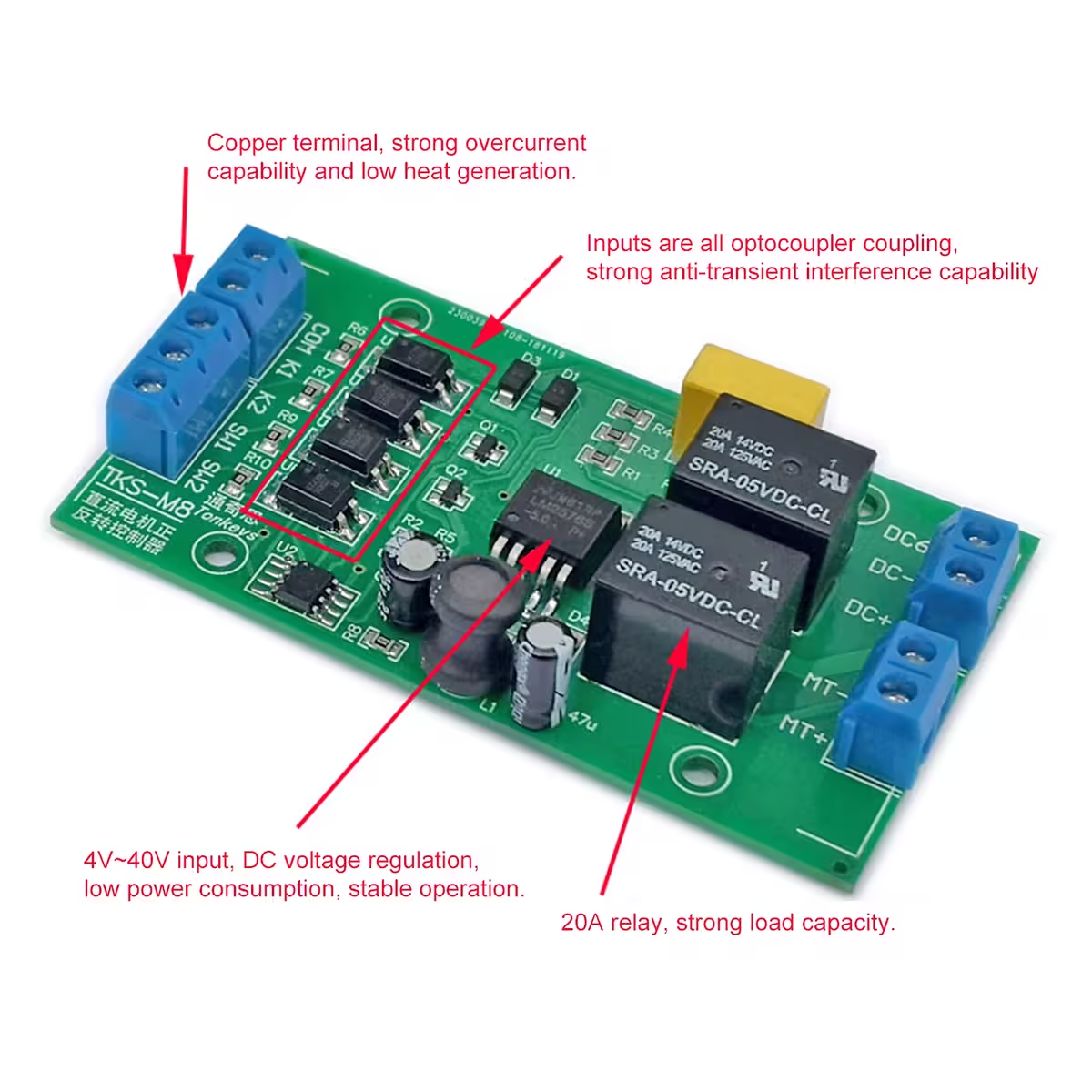
- Large plage de tension : 4–40V CC — compatible avec les batteries LiPo, les alimentations de laboratoire ou industrielles sans aucune modification.
- Courant de sortie jusqu’à 20A — gère les moteurs avec des pics de démarrage élevés, adapté aux charges allant jusqu’à ~80W.
- Deux modes sélectionnables : PO et P1 — choisissez entre le mode auto-maintien (démarrage par impulsion courte) et le mode jog (activation uniquement pendant l’appui), selon vos besoins.
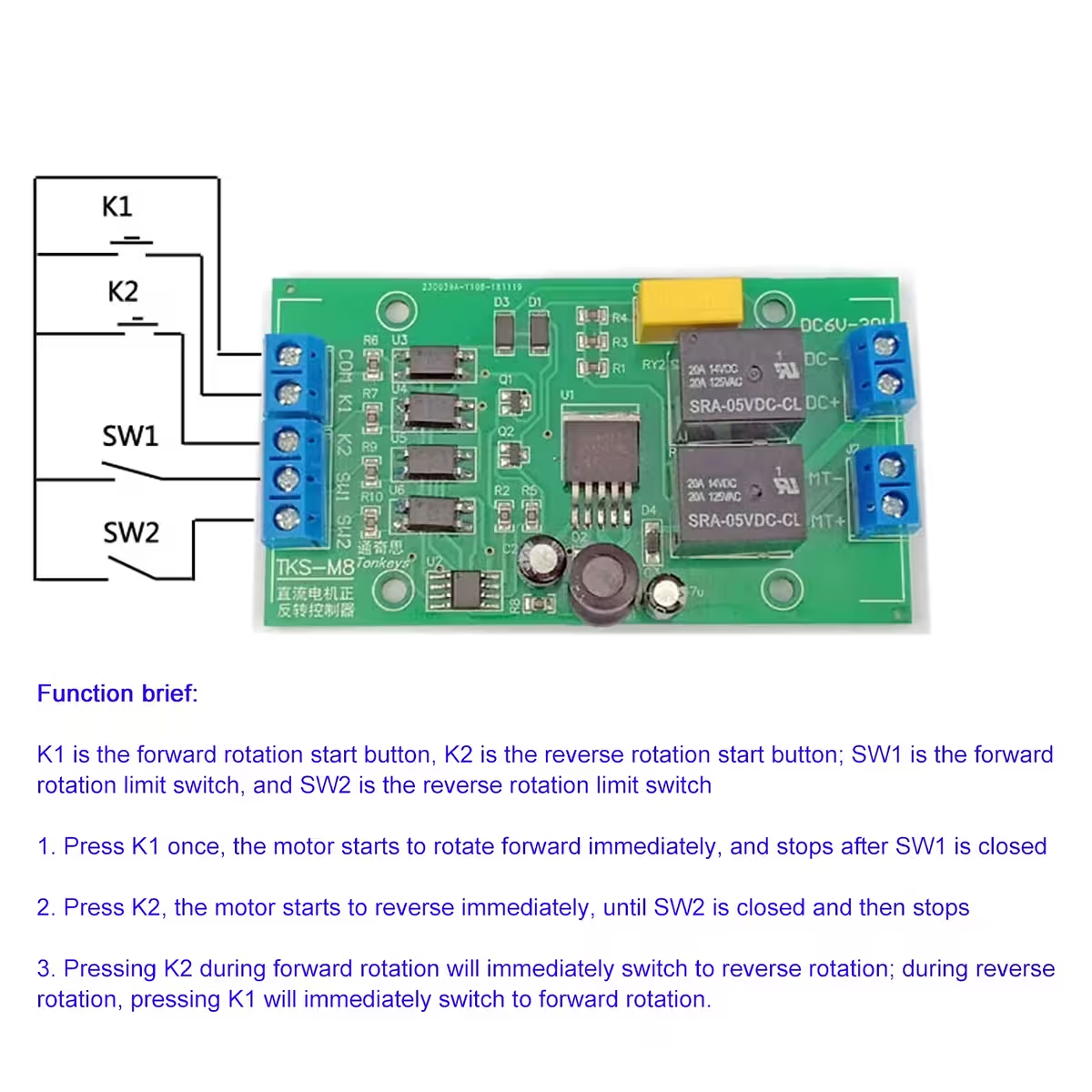
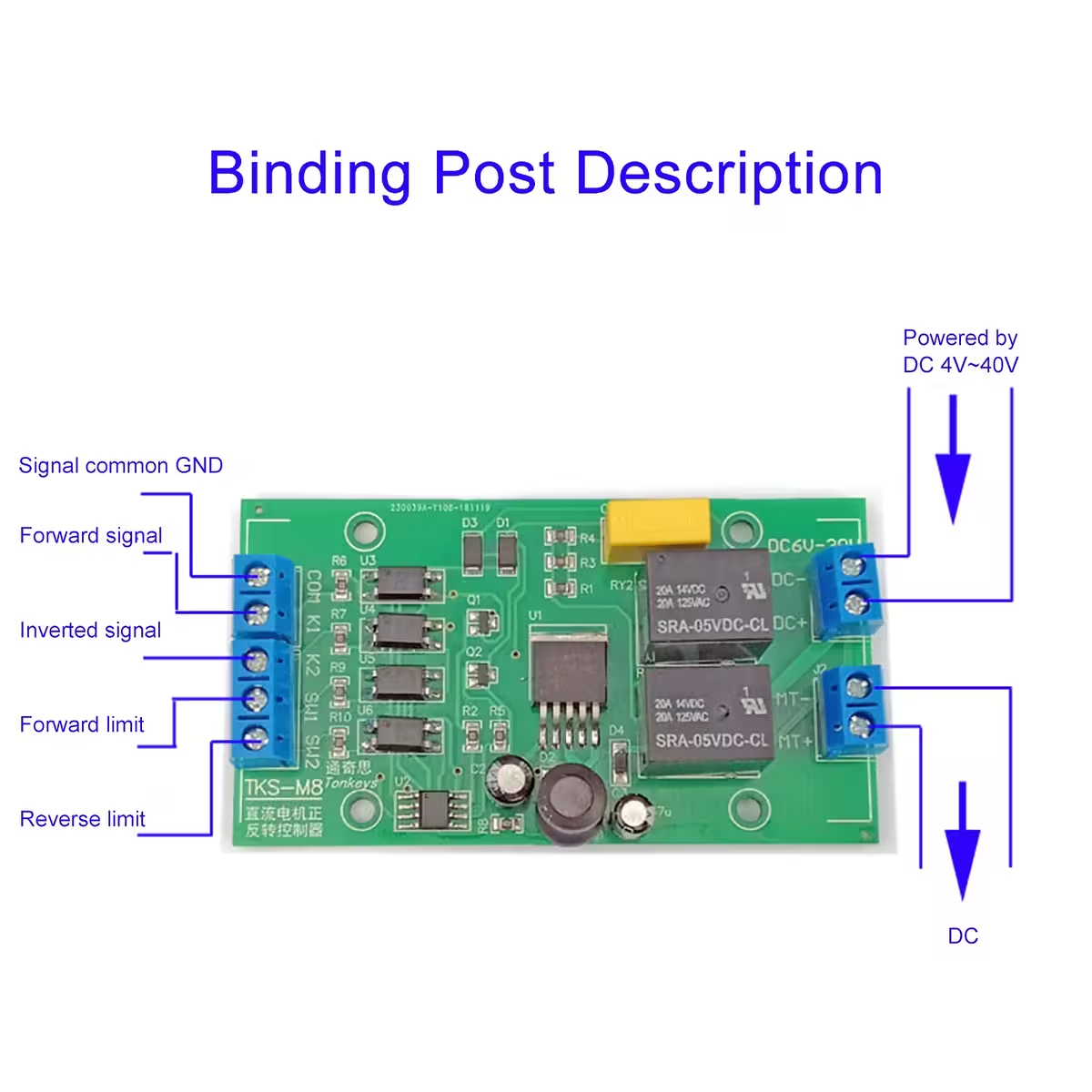
- Entrées universelles « active-low » — connexion directe de boutons simples, de fins de course mécaniques NO ou de capteurs NPN 3 fils, sans logique ni résistance additionnelle.
- Fins de course intégrés SW1/SW2 — arrêt automatique en fin de course pour éliminer tout risque de blocage mécanique ou de surcharge.
- Durée de vie > 150 000 cycles — une fiabilité éprouvée pour les applications répétitives quotidiennes.
- Consommation réduite : 0,6W en activité / 0,1W en veille — préserve vos batteries lorsque le système est au repos.
Détails techniques et performances
Le contrôleur utilise une architecture à entrées « active-low » : une entrée est activée lorsque la tension chute en dessous de 2V. Cela permet de connecter directement des boutons poussoirs, des fins de course NO (normalement ouverts) et des capteurs NPN-NO 3 fils sans composants intermédiaires.
Le temps de réponse est de ≈20ms pour les commandes K1/K2 et de ≈50ms pour les fins de course SW1/SW2 — un équilibre idéal entre réactivité pour les applications dynamiques et stabilité pour éviter les déclenchements intempestifs.
À des tensions plus élevées, le courant recommandé diminue : à 12V, vous pouvez utiliser jusqu’à 20A, tandis qu’à 24V, il est conseillé de limiter à ~10A pour assurer une gestion thermique optimale sur le long terme. Utilisez toujours un fusible dimensionné correctement et des câbles adaptés à la charge.
| Paramètre | Valeur / Détail |
|---|---|
| Tension de fonctionnement | 4–40V CC (6–36V recommandé) |
| Courant de sortie max. | Jusqu’à 20A (à 12V) |
| Puissance moteur recommandée | Jusqu’à ~80W |
| Consommation (actif) | env. 0,6W |
| Consommation (veille) | env. 0,1W |
| Type de signal d’entrée | Active-low (actif si tension < 2V) |
| Temps de réponse K1/K2 | ≈ 20ms |
| Temps de réponse SW1/SW2 | ≈ 50ms |
| Modes de fonctionnement | PO (auto-maintien) / P1 (jog) |
| Durée de vie | > 150 000 cycles |
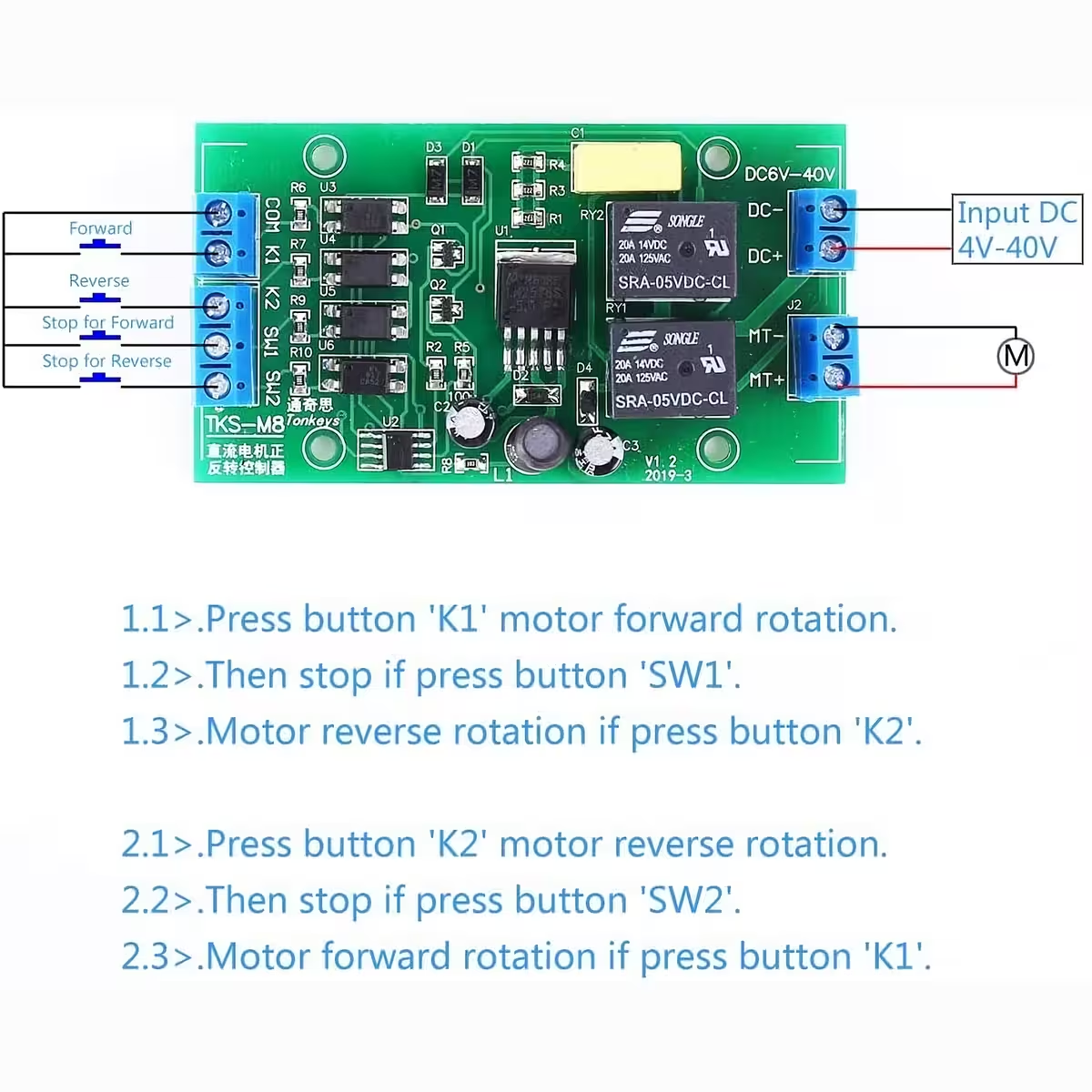
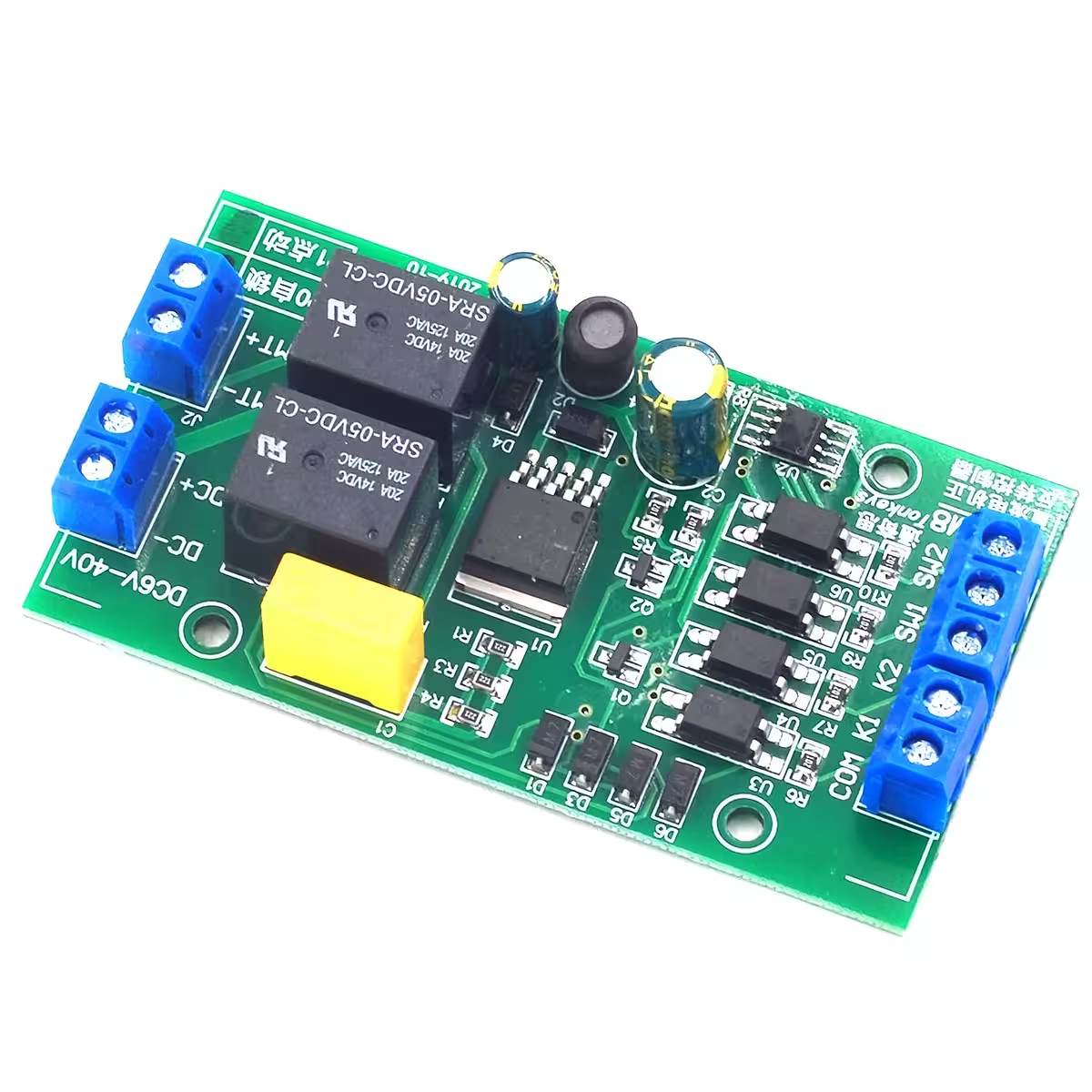
| Entrée K1 | Commande marche avant (active-low) |
| Entrée K2 | Commande marche arrière (active-low) |
| SW1 | Fin de course marche avant (NO recommandé) |
| SW2 | Fin de course marche arrière (NO recommandé) |
| VIN+ / VIN- | Alimentation du module 4–40V CC |
| Motor+ / Motor- | Sortie vers moteur CC |
Instructions de programmation et d’utilisation
Mode PO (Auto-maintien) : Une impulsion courte sur K1 ou K2 démarre le moteur. Il continue de fonctionner jusqu’à l’activation du fin de course correspondant ou la réception d’une commande opposée. Idéal pour les automatisations.
Mode P1 (Jog) : Le moteur est actif uniquement tant que la commande K1 ou K2 est maintenue. Idéal pour les réglages fins et le positionnement manuel.
- Connectez l’alimentation à VIN+ et VIN– (respectez la polarité).
- Connectez le moteur CC à Motor+ et Motor–.
- Sélectionnez le mode : PO pour l’auto-maintien ou P1 pour le mode jog.
- Connectez vos boutons ou signaux de commande à K1 (avant) et K2 (arrière) — entrées active-low.
- Connectez optionnellement les fins de course ou capteurs NPN-NO à SW1 et SW2.
- Pour un mouvement cyclique automatique A→B→A : connectez les sorties des commutateurs NO de la position A vers K1 et de la position B vers K2, en laissant SW1/SW2 déconnectés.
- Pour une intégration Arduino : reliez le GND de l’Arduino au GND du contrôleur, et utilisez deux broches numériques (une pour K1, une pour K2). Configurez les broches en sortie (OUTPUT) et envoyez un signal LOW pour activer la commande.
- Vérifiez le courant de démarrage de votre moteur et installez un fusible adapté sur la ligne d’alimentation.
Contenu du colis
- 1 × Contrôleur de direction pour moteur CC (Forward / Reverse), modes PO/P1
Questions fréquentes
Que signifie « active-low » et pourquoi est-ce important ?
L’entrée s’active lorsque la tension descend sous 2V, c’est-à-dire lorsqu’elle est reliée à la masse (GND). Les boutons simples, les fins de course NO et les capteurs NPN fonctionnent ainsi naturellement. Aucune résistance de tirage ou logique d’inversion n’est nécessaire.
Quelle est la différence entre les modes PO et P1 ?
En mode PO, une impulsion courte suffit à lancer le moteur jusqu’à la fin de course ou l’inversion — parfait pour l’automatisation. En mode P1, le moteur ne tourne que pendant l’appui sur le bouton — idéal pour le contrôle manuel ou le positionnement précis.
Puis-je connecter ce contrôleur directement à un Arduino ?
Absolument. Reliez le GND de l’Arduino au GND du contrôleur et utilisez deux broches numériques configurées en sortie. Un état LOW sur la broche active la commande. L’Arduino gère la logique, le contrôleur gère la puissance.
Puis-je utiliser des fins de course à contact normalement fermé (NC) ?
Le contrôleur est optimisé pour des contacts NO (normalement ouverts). Les contacts NC inversent la logique et peuvent provoquer un comportement erratique. Utilisez toujours des contacts NO pour SW1 et SW2.
Un dissipateur thermique est-il nécessaire à pleine puissance ?
Pour des courants proches de 20A ou en cas d’utilisation intensive, assurez une ventilation adéquate et surveillez la température. Pour des applications continues à forte charge, l’ajout d’un dissipateur ou d’une ventilation forcée prolongera considérablement la durée de vie du module.
Comment créer un mouvement cyclique sans temporisateur ?
Reliez les commutateurs NO de la position A vers K1 et de la position B vers K2, sans utiliser SW1/SW2. À chaque fin de course, le commutateur déclenche automatiquement l’inversion du sens de rotation, créant un mouvement de va-et-vient continu.
Vidéo de présentation
Galerie photo











Avis
Il n’y a pas encore d’avis.