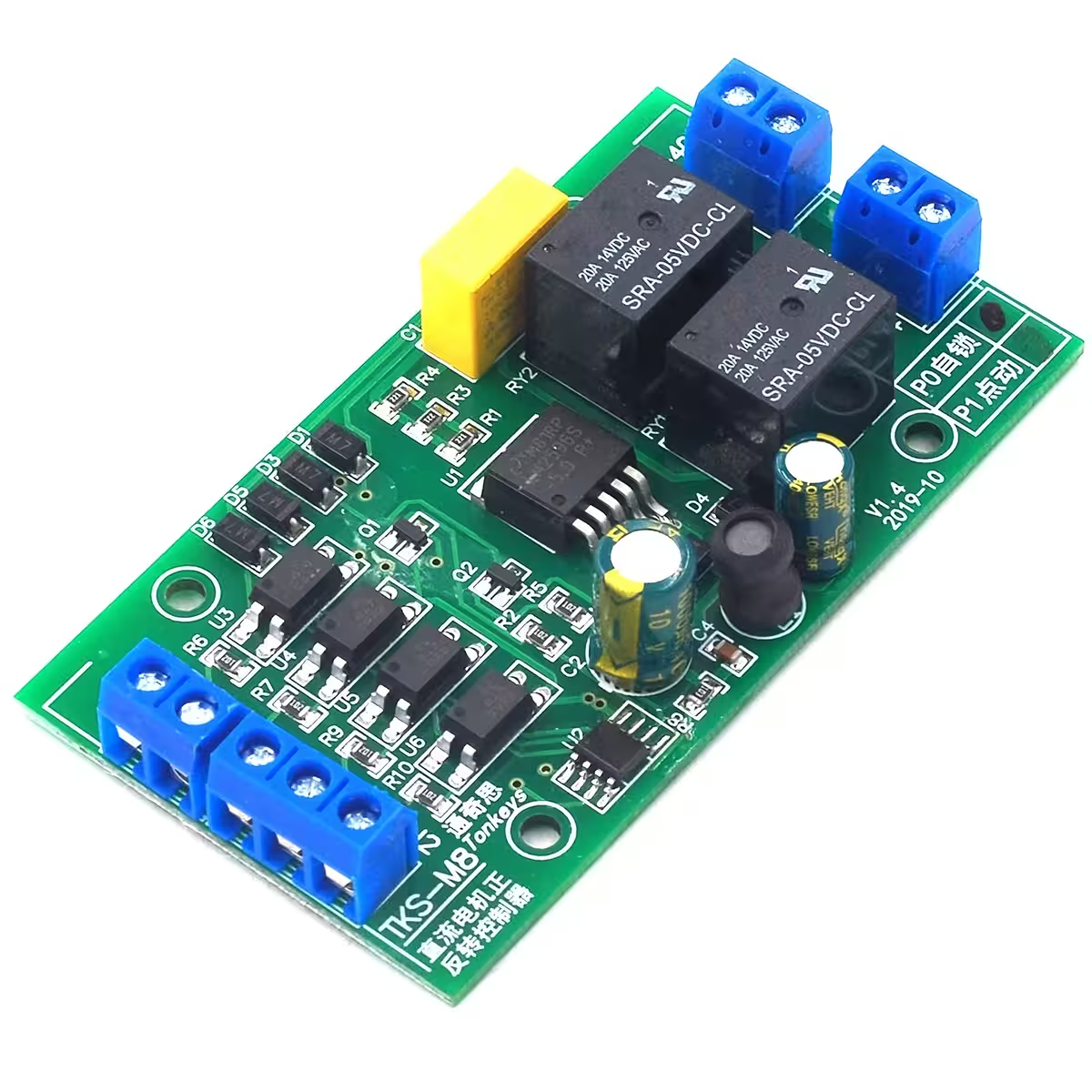
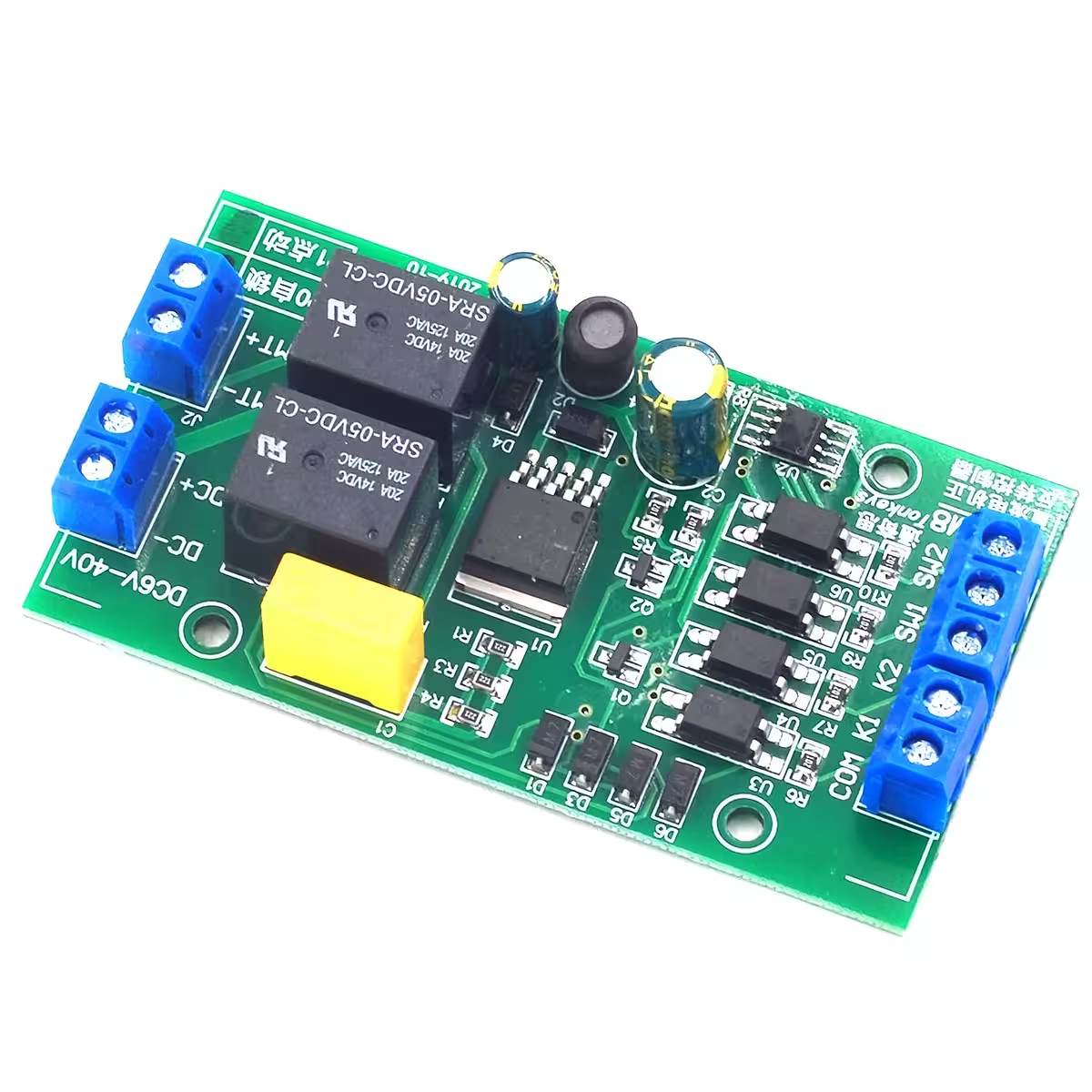
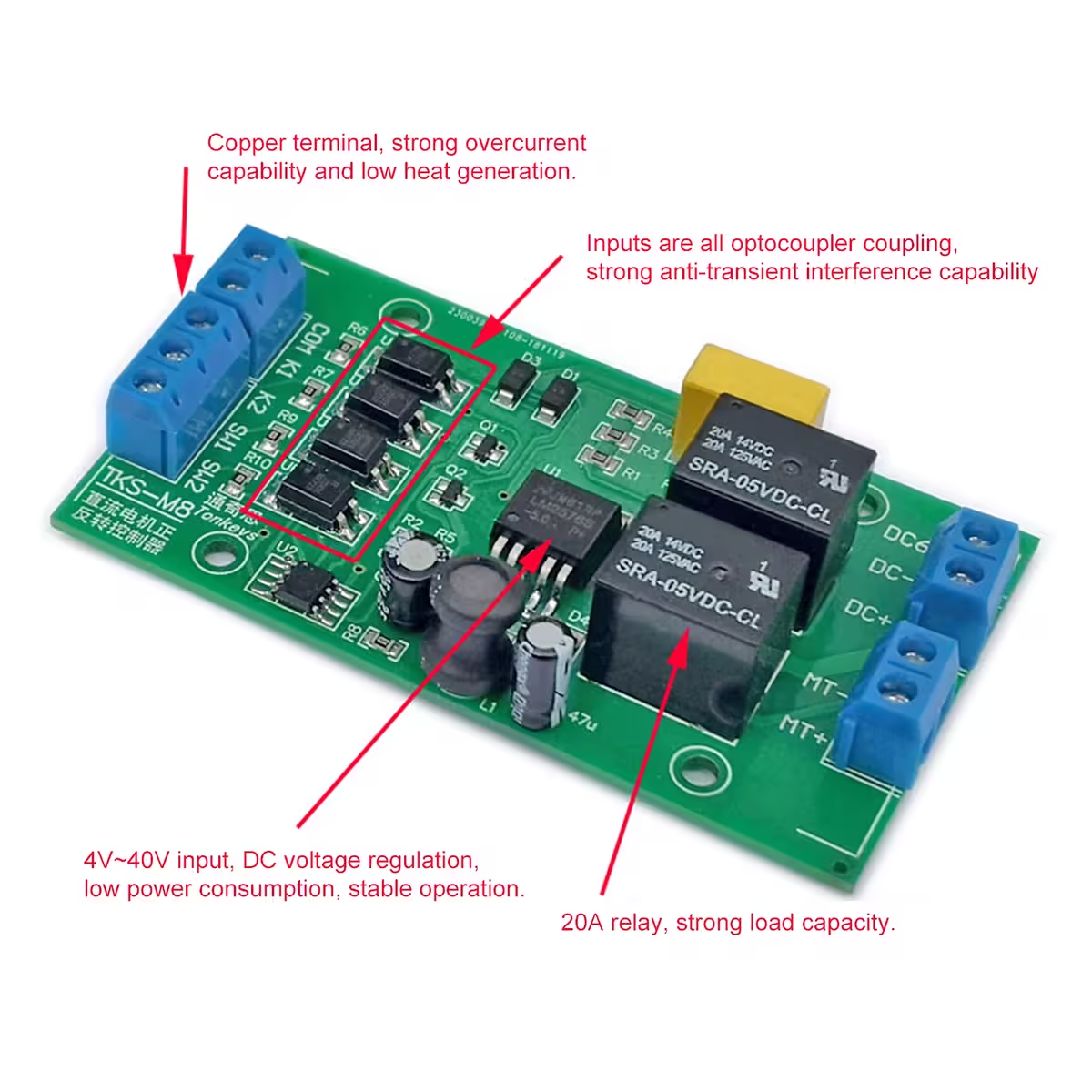
Contrôleur de direction pour moteur – DC 4–40V, jusqu’à 20A, modes PO/P1 avec limiteurs
Module compact pour le contrôle de la direction des moteurs DC, idéal pour les systèmes avec limiteurs de course, actionneurs, mécanismes linéaires ou projets DIY nécessitant des fonctions avant/arrière. Fonctionne sur une large plage de tensions, entre 4V et 40V, avec une recommandation de fonctionnement stable entre 6V et 36V. Le moteur connecté reçoit la même tension que l’alimentation du module.
Spécifications techniques
Tension de fonctionnement : DC 4–40V (recommandé 6–36V)
Consommation du module : env. 0,6W sans moteur, 0,1W en veille
Courant max sortie : jusqu’à 20A
Durée de vie : >150 000 actions
Puissance moteur recommandée : jusqu’à ~80W
Type d’entrée signal : active-low (activé quand tension < 2V)
Temps de réponse : K1/K2 ≈ 20ms, SW1/SW2 ≈ 50ms
Modes de fonctionnement : PO (auto-maintien) / P1 (jog)
Modes de fonctionnement PO et P1
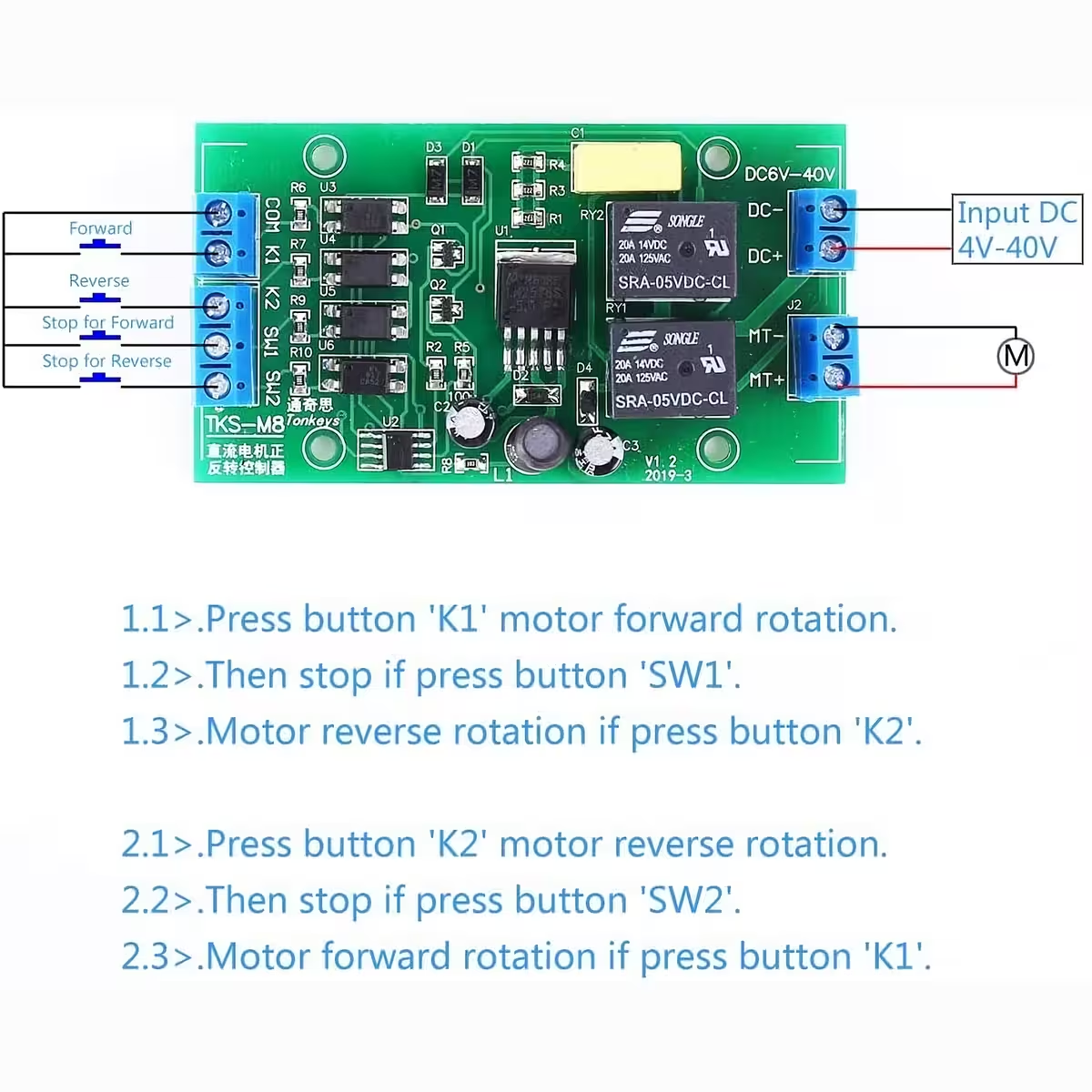
PO (Standard / Auto-maintien) : Une impulsion courte sur K1 ou K2 démarre le moteur qui fonctionne seul jusqu’au limiteur ou jusqu’à commande opposée.
P1 (Jog) : Le moteur fonctionne uniquement tant que la commande est active. Idéal pour des réglages précis.
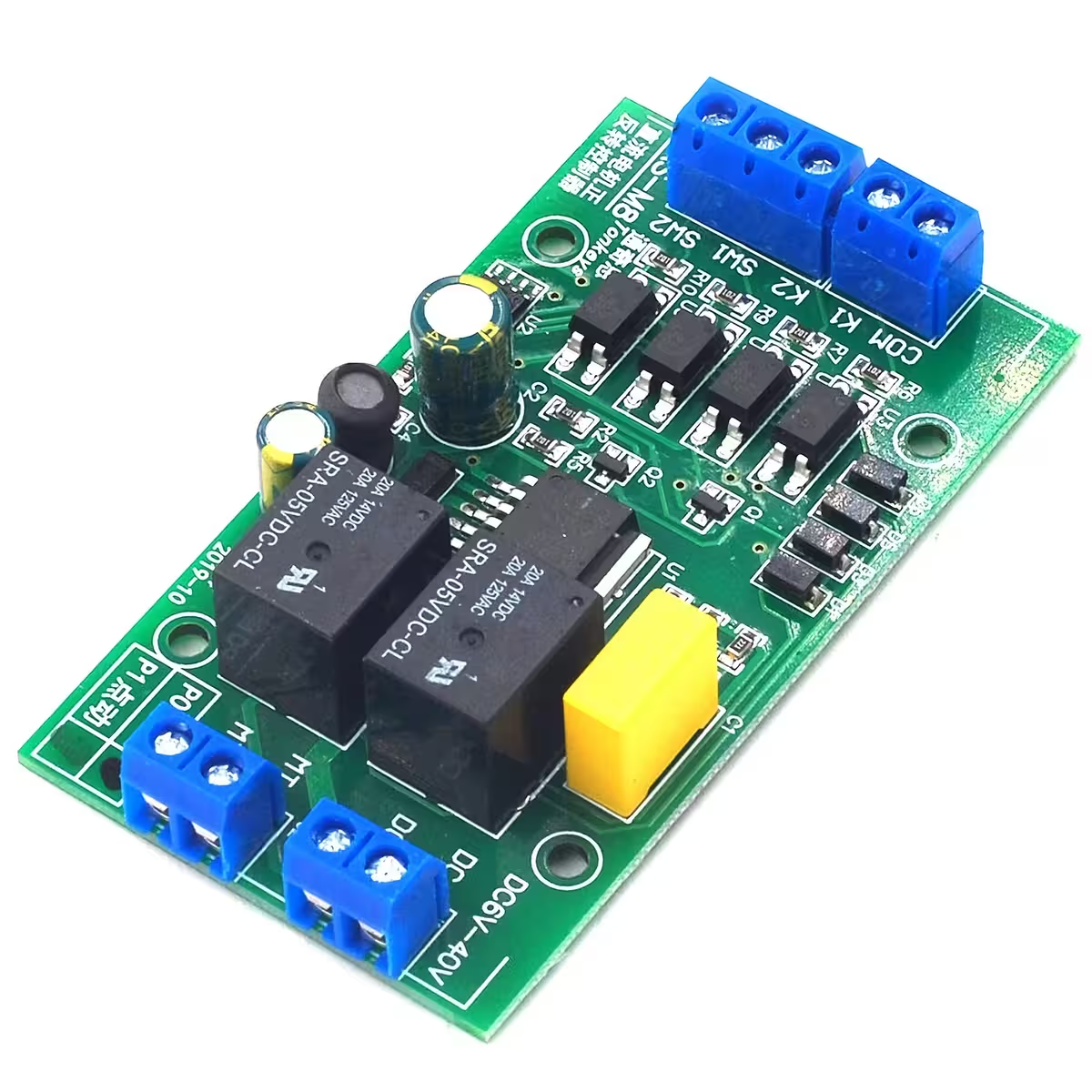
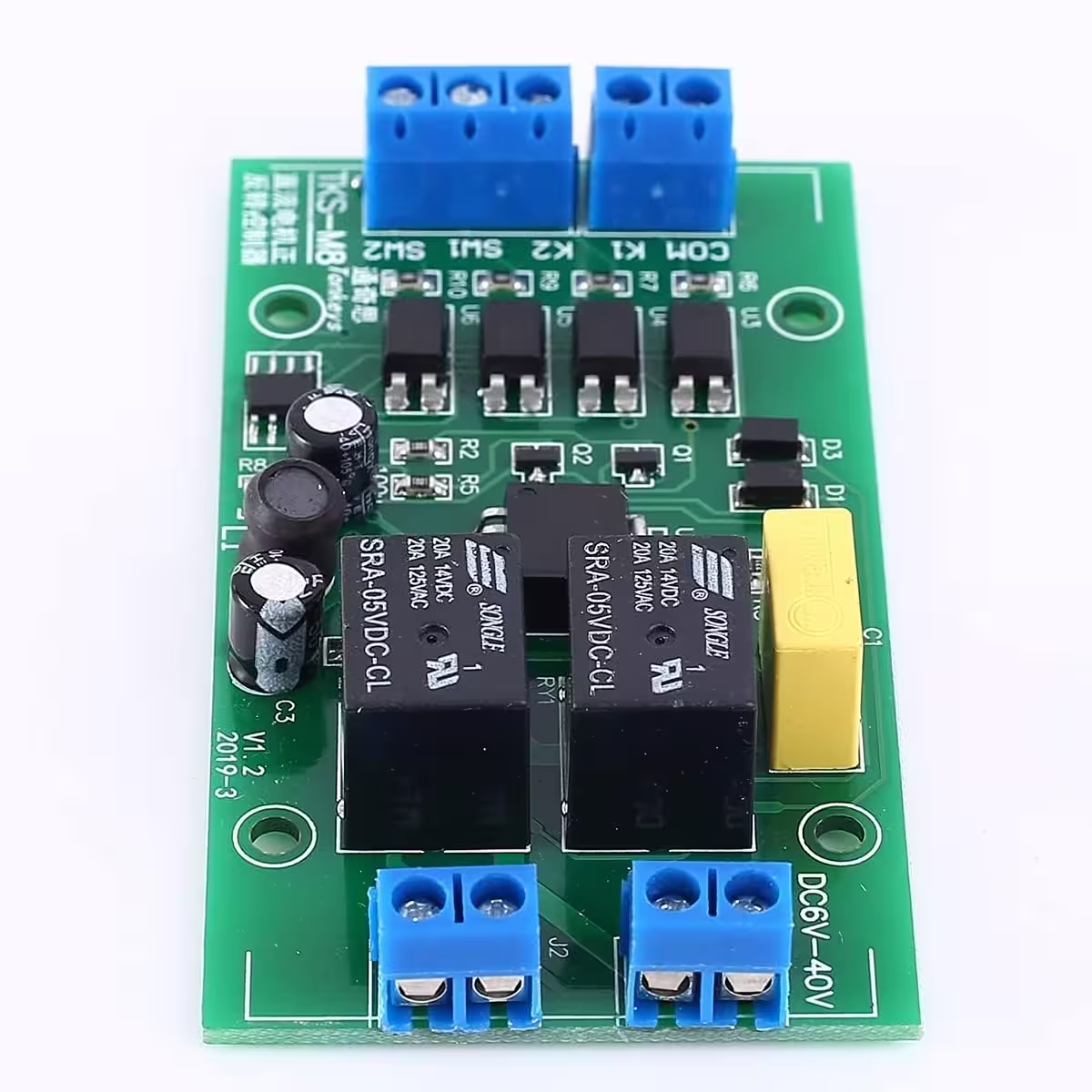
Entrées et limiteurs
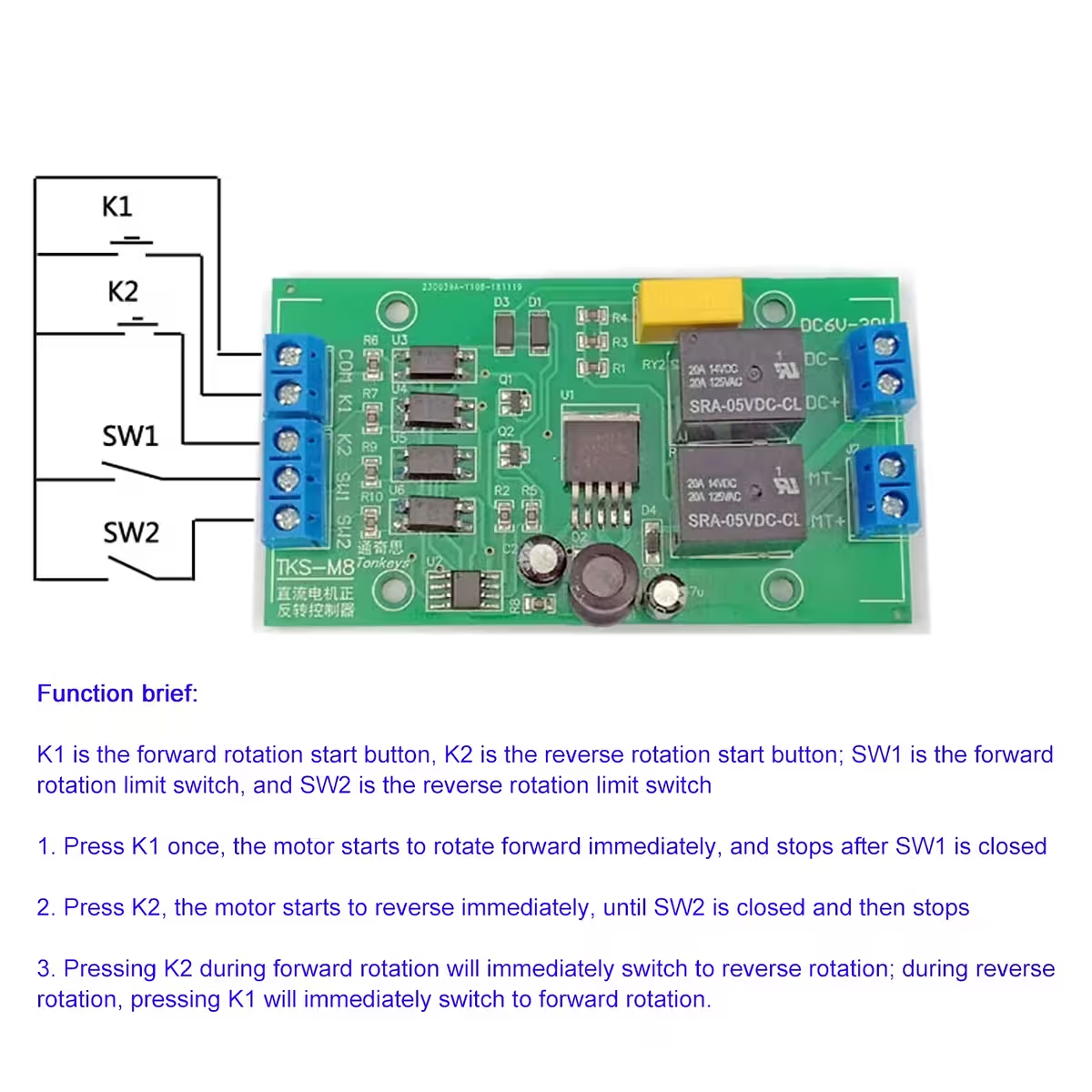
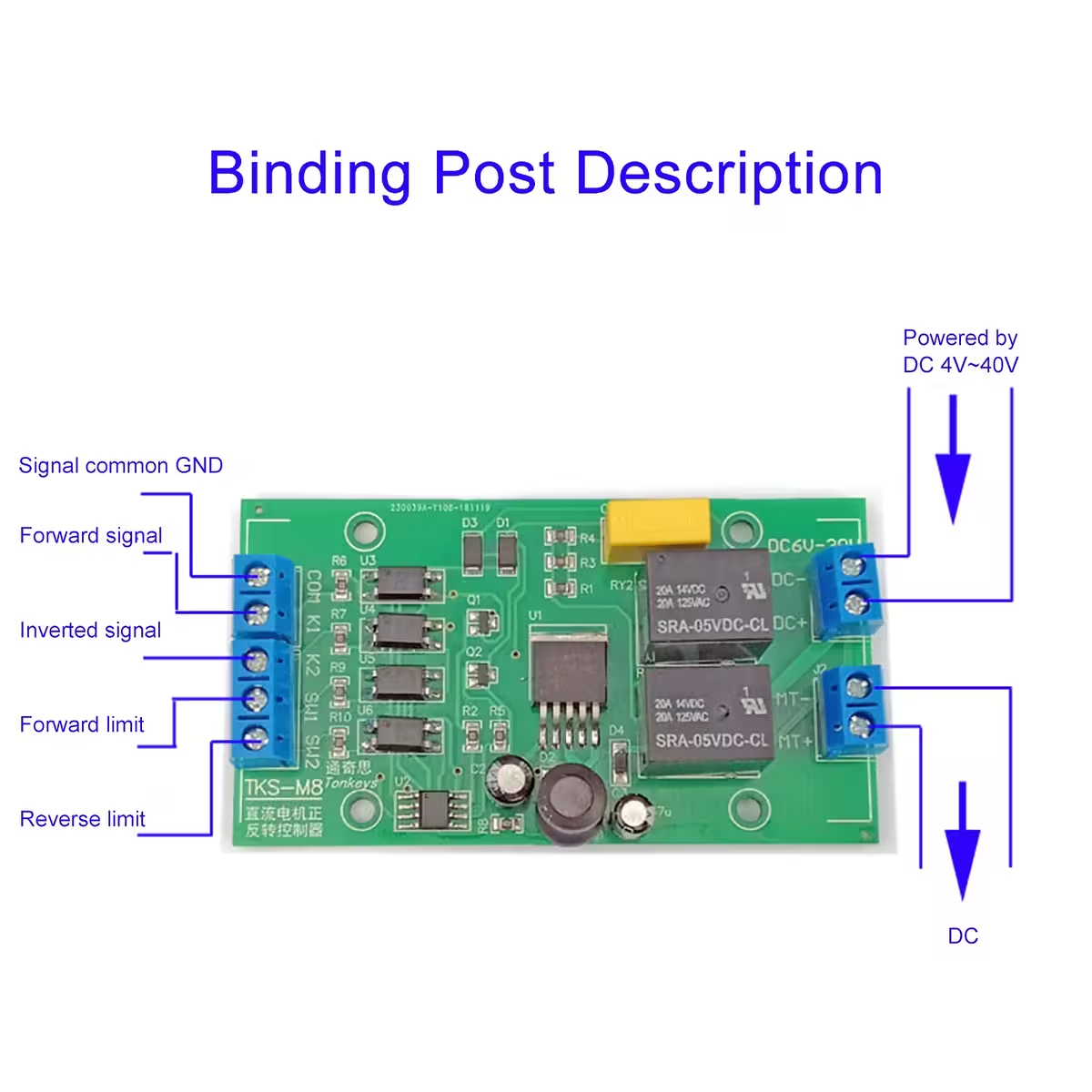
K1 : commande avant (active-low)
K2 : commande arrière (active-low)
SW1 : limiteur avant (NO recommandé)
SW2 : limiteur arrière (NO recommandé)
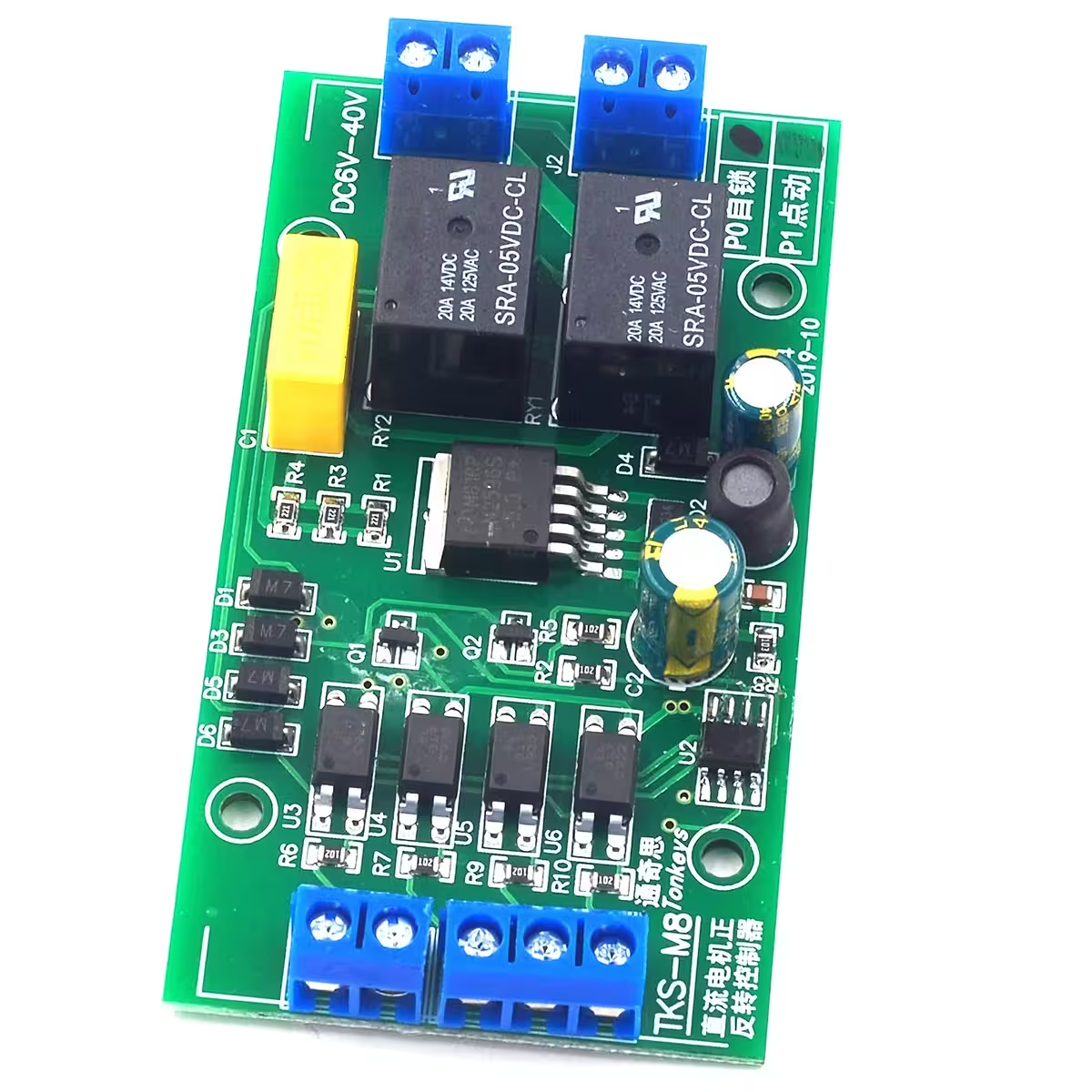
VIN+ / VIN- : alimentation du module (DC 4–40V)
Motor+ / Motor- : sortie vers le moteur
Les entrées active-low permettent l’utilisation de boutons simples, limiteurs mécaniques ou capteurs NPN-NO (3 fils).
Fonctionnalité avec limiteurs et mouvement automatique
SW1 et SW2 agissent comme des arrêts de sécurité : si activés, le moteur s’arrête instantanément. Il est possible de créer un mouvement automatique entre deux points sans minuterie interne :
Point A → connecté à K1
Point B → connecté à K2
SW1 et SW2 non connectés
Commutateurs NO sur positions A et B
Le moteur fonctionnera en continu A → B → A → B, en cycle répétitif.
Option minuterie / relais temporisé
Le contrôleur peut être combiné avec un minuteur pour définir exactement combien de temps le moteur avance et recule. Cela permet des cycles automatiques précis sans intervention manuelle. Des minuteries simples (IN+/IN–, O+/O–) ou des modèles avec VCC, S1, S2 peuvent être utilisés.
Compatibilité Arduino – contrôle avancé et automatisation
Le module fonctionne parfaitement avec Arduino car les entrées K1 et K2 sont active-low, c’est-à-dire activées lorsqu’elles sont reliées à la masse (GND). Arduino peut ainsi contrôler la direction du moteur avec seulement deux pins numériques, tandis que le contrôleur gère la commutation du courant.
Comment connecter Arduino au contrôleur
Arduino GND → GND du contrôleur (obligatoire)
Pin numérique Arduino → K1 (avant)
Pin numérique Arduino → K2 (arrière)
Les limiteurs SW1/SW2 peuvent être utilisés directement sur le contrôleur ou lus via Arduino.
Fonctionnalités possibles avec Arduino :
Définir exactement la durée d’avancement
Définir la durée de recul
Définir les pauses entre les cycles
Définir le nombre de cycles
Arrêt aux limiteurs
Accélération, décélération, rampe
Lecture de capteurs (courant, position, obstacle, fin de course)
Arduino devient le « cerveau » de l’automatisation, le contrôleur gérant la commutation de puissance vers le moteur. Cette combinaison est idéale pour des projets avancés et des systèmes entièrement programmables.
Performances et recommandations
À 12V – courant max 20A
À 24V – courant utilisable ~10A
Vérifier le courant de démarrage du moteur
Assurer câbles et connecteurs adaptés
Fusible recommandé pour protection
Contenu du paquet
1 × Contrôleur de direction moteur (Avant / Arrière)
Vidéo de présentation
Galerie photo
Avis
Il n’y a pas encore d’avis.
Soyez le premier à laisser votre avis sur “Contrôleur moteur DC 12V/24V avec inversion – changement de sens du moteur à courant continu, contrôle avant/arrière manuel ou automatique” Annuler la réponse















Avis
Il n’y a pas encore d’avis.